產(chǎn)品中心 > 機器人介紹 > RA010N機器人

RA010N 概述:
負(fù)載 10 kg
軸數(shù) 6
伸展距離 1,450 mm
重復(fù)性 ±0.06 mm
軸數(shù) 6
伸展距離 1,450 mm
重復(fù)性 ±0.06 mm
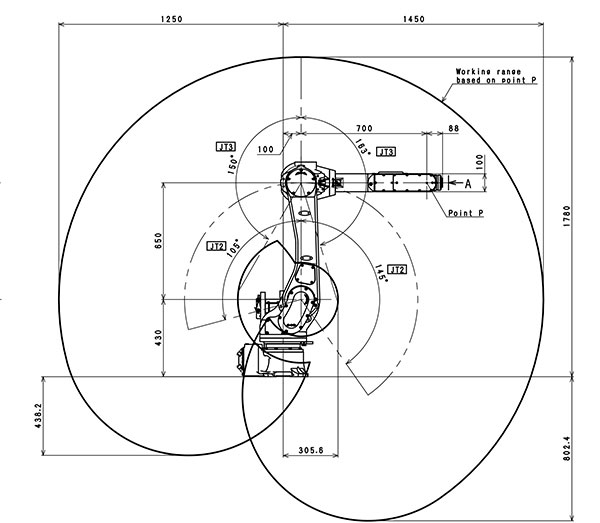
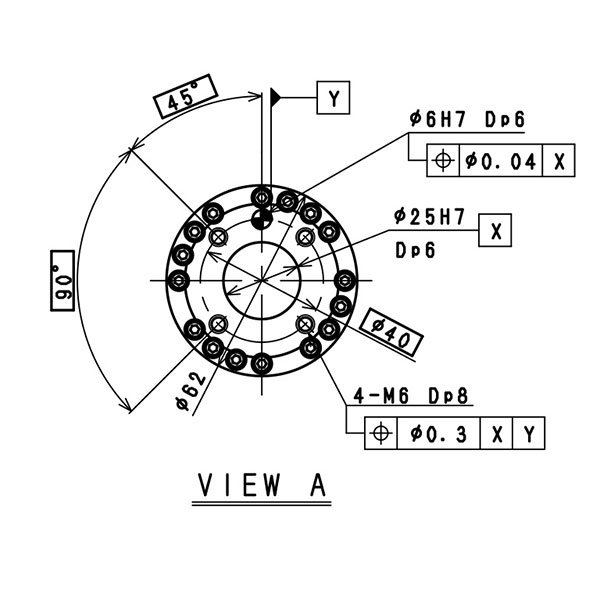
運動范圍與尺寸:
點擊下面的圖片來查看。圖中所示尺寸單位為毫米(mm)。
RA010N的規(guī)格
| 類型 |
| 自由度 |
| 負(fù)載 (kg) |
| 伸展距離 (mm) |
| 位置重復(fù)性 (mm) ?1 |
| 運動范圍 (°) |
| 速度 (°/s) |
| 慣量 (N?m) |
| 慣性力矩 (kg?m2) |
| 質(zhì)量 (kg) |
| 機身顏色 |
| 安裝 |
| 環(huán)境條件 |
| 電源要量 (kVA) ?2 |
| 保護等級 |
| 控制柜 |
| 多關(guān)節(jié)型機器人 | |
| 6 | |
| 10 | |
| 1,450 | |
| ±0.06 | |
| 手臂旋轉(zhuǎn) (JT1) | ±180 |
| 手臂前后 (JT2) | +145 - ?105 |
| 手臂上下 (JT3) | +150 - ?163 |
| 手腕旋轉(zhuǎn) (JT4) | ±270 |
| 手腕彎曲 (JT5) | ±145 |
| 手腕扭轉(zhuǎn) (JT6) | ±360 |
| 手臂旋轉(zhuǎn) (JT1) | 250 |
| 手臂前后 (JT2) | 250 |
| 手臂上下 (JT3) | 215 |
| 手腕旋轉(zhuǎn) (JT4) | 365 |
| 手腕彎曲 (JT5) | 380 |
| 手腕扭轉(zhuǎn) (JT6) | 700 |
| 手腕旋轉(zhuǎn) (JT4) | 22 |
| 手腕彎曲 (JT5) | 22 |
| 手腕扭轉(zhuǎn) (JT6) | 10 |
| 手腕旋轉(zhuǎn) (JT4) | 0.7 |
| 手腕彎曲 (JT5) | 0.7 |
| 手腕扭轉(zhuǎn) (JT6) | 0.2 |
| 150 | |
| 孟塞爾10GY9/1當(dāng)量 | |
| 地面, 懸掛 | |
| 環(huán)境溫度(°C) | 0 - 45 |
| 相對濕度(%) | 35 - 85 (無結(jié)露) |
| 2.0 | |
| IP65 | |
| 型號 面向北美 | E01 |
| 型號 面向歐洲 | |
| 型號 面向日本 & 亞洲 | |